
Los tornillos que se utilizan en implantología son de muy pequeño tamaño, sean para sujeción de prótesis sobre pilares, para cierre de cabezas en fase de reposo entre cirugía y prótesis, o cualquier otro cometido.
Resumen
Los diminutos tornillos de por sí difíciles de manipular en la cavidad oral lo son más si el sistema de ajuste destornillador/tornillo para el apriete es de ranura simple, pues se escapan con facilidad de los destornilladores planos.
La caída de un tornillo suelto en la cavidad oral puede llegar a generar situaciones de urgencia, con sus consecuencias de salud y jurídicas.
Utilizamos un tubo de silicona hueco para ferulizar tornillo y destornillador de modo que el conjunto forme un sólido y seguro sistema. Gracias al tubo de silicona el tornillo puede ser manipulado por el destornillador a él ensamblado en cualquier dirección del espacio.
Nuestro desarrollo es sencillo pero tremendamente eficaz en la práctica. El conjunto destornillador/tornillo rodeado por el tubo de silicona podrá ser trabajado con gran seguridad en el interior de la cavidad oral.
Palabras clave
Microtornillos; implantología; cirugía implantológica; prótesis sobre implantes; seguridad; asfixia por cuerpo extraño; nuevos métodos de trabajo.
Introducción
Pretendemos con este trabajo mostrar nuestra solución práctica y sencilla a un problema antiguo: la manipulación de los microtornillos en prótesis sobre implantes.
Algunas casas comerciales de modo general o tratando casos protésicos particulares, falta de paso oclusal, utilizan tornillos de cabeza plana y ranura simple o en cruz que son muy difíciles de sujetar en un espacio tan pequeño y angosto en ocasiones como es la cavidad oral.
Los esfuerzos de una cirugía generan un cansancio que hay que procurar aliviar en lo posible. Es así que, si contemplamos el final de una cirugía sobre implantes donde se haya decidido colocar como protectores de rosca tornillos diminutos de cabeza plana y ranurados simples, la manipulación de los mismos puede convertirse en un auténtico suplicio para el práctico.
Asimismo, en el caso de la colocación de una prótesis con atornillamiento en los sectores posteriores bucales con este tipo de tornillos la dificultad de abocar un microtornillo puede convertirse en un auténtico calvario y, además, en un riesgo clínico que genera estrés.
La caída de un microtornillo en la cavidad oral puede dar lugar a consecuencias peligrosas. En la posición de decúbito supino en la que se encuentra el paciente tumbado en el sillón dental, cualquier elemento perdido en boca por gravedad resbalará hacia faringe y laringe. Si el paciente respira en ese momento el microtornillo puede dirigirse a laringe y penetrar en vías respiratorias con la consiguiente posibilidad de asfixia por obstrucción o contractura traqueal por cuerpo extraño. Este suceso es de una probabilidad muy baja, pero puede suceder. Y si esto ocurre las consecuencias para el práctico pueden ser muy graves desde el punto de vista profesional y jurídico.
En cirugía traumatológica se utilizan ceras duras para ferulizar tornillo y destornillador a fin de manipular con seguridad el atornillamiento.
Probamos este sistema, pero nos ha resultado demasiado engorroso.
Últimamente, se nos ocurrió utilizar tubo de silicona de los desechados de las palomillas que empleamos en cirugía. Los resultados han sido muy satisfactorios.
Colocando el microtornillo en el interior del tubo de silicona, por uno de los extremos, el destornillador lo empuja con seguridad y suavidad hacia el extremo contrario, formándose un conjunto destornillador-tubo-microtornillo que permite la manipulación segura en los tres ejes del espacio de cualquier microtornillo.
Es conveniente conocer algunos términos simples de ingeniería mecánica antes de proseguir con la descripción del método.
Materiales y métodos
Términos de ingeniería mecánica que debe conocer un implantólogo
Un implante odontológico de tipo raíz, como los normalmente usados, no es mecánicamente sino un tornillo más o menos modificado, pero un tornillo a la postre.
 |
Los microtornillos acoplarán sobre las cabezas de los tornillos mayores los implantes, para ir encajando elementos sucesivamente, hasta constituir un puente protésico fijo o una base atornillada para sobredentadura.
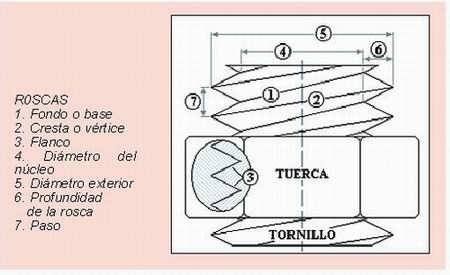
Conviene un breve recordatorio de ingeniería mecánica para comprender algunos términos usados con frecuencia en implantología oral y que nos confunden con cierta frecuencia: rosca, paso de rosca, filete, métrica, macho, hembra, cabeza, cresta, vértice, flanco, Philips, Allen, etc.
Un tornillo (Figura 1) es un elemento mecánico comúnmente empleado para la unión desmontable de distintas piezas, aunque también se utiliza como elemento de transmisión. Básicamente es un cilindro con rosca helicoidal y cabeza, frecuentemente acompañado de la correspondiente tuerca.
Orígenes históricos
Los primeros antecedentes de la utilización de roscas se remontan al tornillo de Arquímedes, desarrollado por el sabio griego alrededor del 300 a.C, empleándose ya en aquella época profusamente en el valle del Nilo para la elevación de agua.
Durante el Renacimiento las roscas comienzan a ser usadas como elementos de fijación en relojes, máquinas de guerra y en otras construcciones mecánicas diversas. Leonardo da Vinci desarrolla por entonces métodos para el tallado de roscas, sin embargo, éstas seguirán fabricándose a mano y sin ninguna clase de normalización hasta bien entrada la Revolución industrial.
En 1841 el ingeniero inglés Joseph Whitworth definió la rosca que lleva su nombre, haciendo William Sellers otro tanto en los Estados Unidos el año 1864. Esta situación se prolongó hasta 1946, cuando la organización ISO define el sistema de rosca métrica, adoptado actualmente en prácticamente todos los países. En los Estados Unidos se sigue empleando la norma de la Sociedad de Ingenieros de Automoción (Society of Automotive Engineers, SAE).
 |
Nomenclatura
Las roscas pueden ser exteriores o machos (tornillos) o bien interiores o hembras (tuercas), debiendo ser sus magnitudes coherentes para que ambos elementos puedan enroscarse.
En el caso de los implantes, lógicamente, la tuerca corresponde a la geometría labrada en la cabeza del implante que recibirá el tornillo macho. Para saber si un tornillo es macho o hembra, simplemente hay que acudir a la biología. El símil mecánico macho/ hembra está tomado de la realidad biológica: el macho entra en la hembra, la hembra envuelve al macho. Así, el tornillo macho entra en la rosca hembra.
Las roscas interiores pueden estar labradas en las cabezas de un tornillo, en nuestro caso del implante, para atornillar sobre ellas tornillos.
Entradas o filetes (Figura 2).
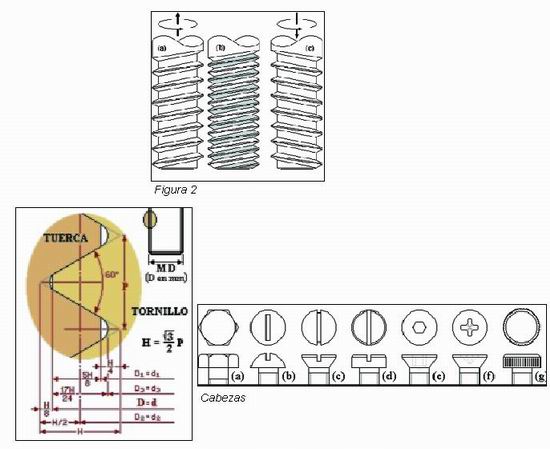 |
La generación de un tornillo puede suponerse arrollando un filete alrededor de un cilindro. En la primera figura del esquema 2, el filete o hilo es trapezoidal, mientras que en la segunda es triangular. En cualquier caso, si la hélice que describe el filete tiene un paso suficientemente grande (a), dejará espacio para arrollar sobre el cilindro otro filete, obteniéndose una rosca de doble entrada (b), o triple si los filetes añadidos son dos. Para determinar el número de entradas de un tornillo, basta apoyar un rotulador en el flanco y girarlo hasta marcar una vuelta completa, quedando el filete correspondiente coloreado; si en medio queda otro sin colorear, será de dos entradas; si quedan dos, de tres entradas, y así sucesivamente.
Sentido de la rosca
En función del movimiento relativo entre el tornillo y la tuerca, existen tornillos (y roscas) a derechas que son aquellos que al girarlos en el sentido contrario al de las agujas del reloj salen de la tuerca y desenroscan (a), y a izquierdas, que son aquellos en los que al girar el tornillo en el sentido contrario al de las agujas del reloj, entra en la tuerca enroscándose (c). Las roscas empleadas son comúnmente a derechas.
Roscas normalizadas.
Tipos y designación
— Rosca triangular
• Métrica: M Ø (diámetro exterior de la rosca Ø en milímetros).
• Métrica fina: M Øxp (paso p en mm).
• Witworth: Ø» (diámetro exterior de la rosca Ø en pulgadas).
• Witworth fina: W Øxp (paso p en pulgadas).
• Witworth de tubo: R Ø» (diámetro nominal del tubo Ø en pulgadas).
— Rosca trapezoidal.
— Rosca redonda.
Usos
Las roscas triangulares se emplean en tornillos de fijación; el truncamiento del filete facilita las operaciones de desmontaje, pero por contra disminuye la estanqueidad de la unión. Las roscas finas (con paso menor que el normal) se emplean cuando la longitud de la unión atornillada es pequeña, por ejemplo en uniones en paredes delgadas de tubos; también pueden emplearse cuando se quiere evitar el aflojamiento de la unión, ya que el mayor número de filetes de contacto entre el tornillo y la tuerca incrementa el rozamiento.
Para el enroscado de tubos se emplean las llamadas roscas de gas derivadas del sistema Witworth, caracterizadas por una elevada estanqueidad (el filete no está truncado) y una relación profundidad/diámetro pequeña para no debilitar la pared del tubo.
Para tornillos de transmisión se usan roscas trapezoidales simétricas o en forma de diente de sierra en aquellos casos en los que la fuerza aplicada tenga un solo sentido.
Las roscas redondas, a pesar de sus buenas cualidades mecánicas se emplean poco debido a su dificultad de fabricación, y por ende, elevado precio. Se usa en aplicaciones en los que la unión haya de soportar impactos.
Cabezas
El diseño de las cabezas de los tornillos lejos de manifestar el capricho de los fabricantes, responde, en general, a dos necesidades. Por un lado, conseguir la superficie adecuada de apoyo para la herramienta de apriete de forma tal que se pueda alcanzar la fuerza necesaria, sin que la cabeza se rompa o deforme. Por otro, necesidades de seguridad implican (incluso en reglamentos oficiales de obligado cumplimiento) que ciertos dispositivos requieran herramientas especiales para la apertura, lo que exige que el tornillo (si éste es el medio elegido para asegurar el cierre) no pueda desenroscarse con un destornillador convencional, dificultándose así que personal no autorizado acceda al interior.
Así, se tienen cabezas de distintas formas: hexagonal (a), redonda (b), cilíndrica (d, g), avellanada (c, e, f); combinadas con distintos sistemas de apriete: hexagonal (a) o cuadrada para llave inglesa, ranura o entalla (b, c, d) y Philips (f) para destornillador, agujero hexagonal (e) para llave Allen, moleteado (g) para apriete manual, etc.
Nuestra propuesta
Nos serviremos de un pequeño trozo longitudinal de tubo de silicona para ensamblar vaina de destornillador y cabeza ranurada del microtornillo para formar un conjunto firme que facilite la manipulación con seguridad del microtornillo en cualquier eje del espacio.
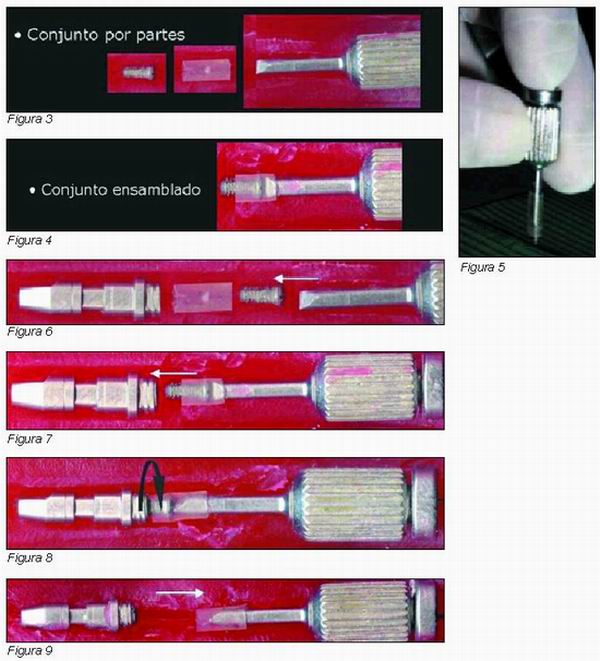
En la Figura 3 mostramos el conjunto por partes que vamos a ensamblar.
En la Figura 4 mostramos el conjunto ensamblado, en disposición de ser usado:
En la Figura 5, conjunto firme destornillador-silicona-tornillo. Boca abajo, no cae.
Tenemos en la Figura 6 los cuatro elementos a intervenir. Vamos a insertar el tornillo con nuestro método. El destornillador empuja el tornillo por la cabeza hacia el interior de la silicona y hará asomar las roscas de la cola por el otro lado del tubo para conjuntamente afrontar el implante.
El conjunto formado destornillador-silicona-tornillo emboca el implante, sólidamente (Figura 7).
Roscamos con seguridad y fácilmente el tornillo sobre el implante (Figura 8).
El tornillo queda fijado en la cabeza, retiramos destornillador/tubo silicona. El trabajo ha finalizado rápida y fácilmente. Sin riesgos, gracias al sencillo ensamblado destornillador-silicona-tornillo (Figura 9).
 |
Caso sobre fantomas
(Figura 10)
Un ejemplo, sobre una escayola enroscando un tornillo con facilidad en maxilar superior en un lugar estrecho. Sin la ferulización con tubo de silicona, esta operación es complicada.
Resolución de un caso clínico
Vamos a atornillar sobre un implante en posición de canino inferior entre dos piezas dentarias con nuestro sistema.
En la Figura 11 el conjunto se acerca boca abajo hacia el implante, el tornillo no cae.
En la Figura 12 el tornillo ya ha embocado la cabeza del implante. Con un dedo sujetamos la cola del implante, con la otra mano volteamos para acoplar el tornillo:
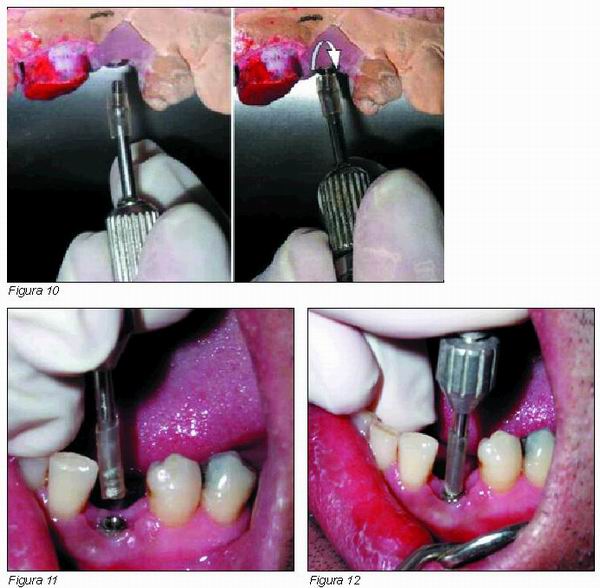 |
Figura 13: El tornillo en posición, roscado y seguro. Sin nuestro método esta operación es en la mayoría de ocasiones complicada, especialmente cuando hablamos de implantes colocados en zonas posteriores de maxilar o mandíbula entre piezas dentarias.
 |
Resultados y conclusiones
Planteamos un sencillo método para resolver con facilidad una situación clínica y quirúrgica que se presenta con mucha frecuencia y que complica en ocasiones extraordinariamente el final de una cirugía.
— La caída de un tornillo suelto en la cavidad oral puede llegar a generar situaciones de emergencia, con sus consecuencias de salud y jurídicas.
— El uso de tubo de silicona no presenta complicación alguna y el acceso al material está al alcance de todos los gabinetes.
— El procedimiento ha mostrado su gran utilidad en todos los procedimientos llevados a cabo.
— El conjunto destornillador/tornillo rodeado por el tubo de silicona podrá ser trabajado con gran seguridad en el interior de la cavidad oral.
— Nuestro desarrollo es sencillo y tremendamente eficaz en la práctica.
Correspondencia
Luis María Ilzarbe
Clínica Ilzarbe
www.icqmed.com/ilz.htm
Avenida del Cid 40 bajo
46018 Valencia
móvil 609 60 93 17
ilzarbe@icqmed.com
Bibliografía
1. Adell, R., Lekholm, U., Rockler, B. & Branemark, P. I. (1981). A 15-year study of osseointegrated implants in the treatment of the edentulous jaw. International Journal of Oral Surgery 10:387-416
2. Albrektsson, T., Branemark, P. I., Hansson, H. A. & Lindstrom, J. (1981). Osseointegrated titanium implants. Requirements for ensuring a long-lasting, direct bone-to-implant anchorange in man. Acta Orthopaedica Scandinavica 52: 155-170
3. Albrektsson, T., Zarb, G., Worthington, P. & Eriksson, A. R. (1986). The long-term efficacy of currently used dental implants: a review and proposed criteria of success. International Journal of Oral & Maxillofacial Implants 1: 11-25.
4. Ferrari, G., Ferrari, M., Hemple, R. (2002) Building robots with lego mindstorms. SYNGRESS MEDIA INC. EEUU.
5. Ogata, K. (2003). Ingenieria de control moderna Pearson educación. 1ª ed. 2003 Madrid
6. Varios autores. Manual de Mecanica Industrial. (2002). 4 vols., 1.ª ed., Madrid.


